06 冲入AI无人区:无人驾驶之路(第7/9页)
不论是静、是动,还是“表面”招数,在绝大多数的行驶过程中,车载的雷达、传感器、摄像头等要实时收集数据,在行车途中反馈到“百度汽车大脑”的服务器上,辅以GPS高精度地图,指导汽车以最佳路径行进。
在定位层面,百度地图2015年达到WiFi定位精度30米,室内高精定位精度1~3米,定位速度0.2秒。2016年,百度无人车使用的高精地图精度是10厘米级,实际行驶中对路况判断的误差小到一根车道线的宽度,相比GPS定位,精度提升了两个数量级。
这一切也要归功于无数百度产品的使用者,包括那些调用百度地图API的用户。使用者在调取时,无形中就帮无人车刷新了数据,增加了一点“智慧”。
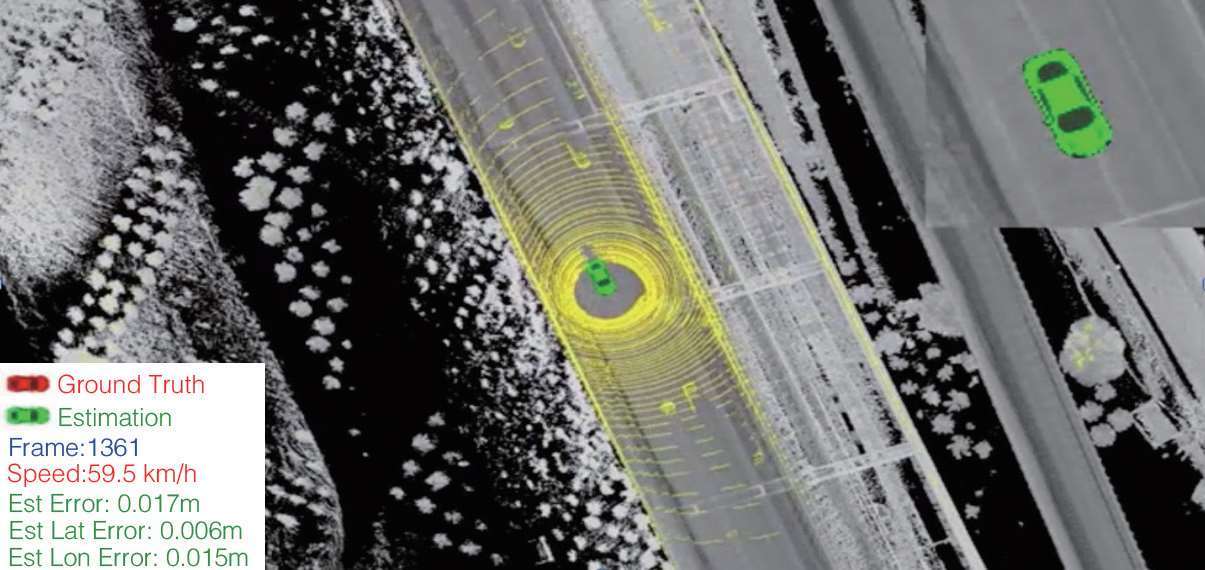
图6-9 比普通GPS定位高两个数量级的高精定位示意图
顺利推进无人车的研发,关键在于构建合理的技术布局。随着技术的升级与革新,以往推广应用的“死结”都会逐渐被化解。业界对无人车是否应该采用激光雷达的争论就是如此。
由于激光雷达造价高昂,外界有人唱衰无人车,正如多年前很多人因为价格而不看好“大哥大”。百度不仅对降价抱有信心,还做出了前瞻性的战略投资。
2015年底,无人车普遍采用的LiDar激光雷达的价格高达70万元,半年后同款批发价已经降为50万元,下降了30%。随着生产工艺的成熟及无人车行业发展带来的规模化效应,激光雷达将有更大的降价空间——毕竟“大哥大”刚面世时售价高达2万元,而今国产的“国民”智能手机只要600元左右。
2016年8月17日,百度与福特公司以1.5亿美元联合投资激光雷达公司Velodyne LiDar。Velodyne预计,如果2017年拿到100万个订单,百度无人车使用的64线激光雷达单价就会直线下降到500美元,2020年激光雷达价格会降到300美元左右,2025年会降到200美元左右。
在无人车的研发势头下,64线激光雷达目前非常紧俏,这项投资确保了百度的传感器供应。但如此巨大的投入,并非只为一时的器件供应,而是以行业带头人撬动整个产业,以利于整个无人车行业的发展。
除此以外,为了改进硬件计算能力,百度自主研发了由48台服务器组成的小集群,计算能力超过了中国超级计算机神威太湖之光。
从百度地图十多年的运营,到百度大脑感知和决策能力的全面开花,再到对激光雷达供应商Velodyne公司的投资,与其说是百度选择了无人车,不如说是百度的专业逻辑将自己推到了必须承担起责任的这一步。
仅有技术层面的可行性是不够的,为了积累路测经验,百度无人车在国内外的试验场上奋力奔跑。在美国加州,百度是第15个获得无人车测试执照的公司。就在2016年底,百度在加州部署了100多名无人车的研究人员和工程师。在国内,百度也要全力做好“中国定制”。鉴于选择测试和初期商业化,在考量道路设施、行人密集度、政府(相关部门)支持力度,甚至当地天气等多方面情况后,百度无人驾驶团队入驻北京、上海和深圳,分别和安徽芜湖市政府、上海国际汽车城、浙江乌镇旅游景区、北京亦庄开发区签署了测试的合作协议。
2016年,在获批的“国家智能网联汽车(上海)试点示范区”封闭测试区内,模拟了城市交通场景,有隧道、林荫道、加油/充电站、地下停车场、十字路口、丁字路口、圆形环岛,还有6个智能红绿灯和40个各类摄像头。整个园区道路实现了北斗系统的厘米级定位和WiFi全覆盖,可以为智能驾驶提供29种场景的测试。
百度在2017年推出了高级自动驾驶人工智能模型Road Hackers,并将基于此模型开放百度自动驾驶训练数据,首期就包含1万公里的L3数据。这部分涉及一线、二线城市等十几个城市的封闭道路的高速、环路、快速公路的数据。今后还会有一些人车混搭的道路数据公开,并逐步开放所有大数据资源。这当中不单是道路数据,还有中国司机的开车习惯,这可能是更为感性和宝贵的数据。这一模型能够在真实的道路情况下,利用深度学习等技术,将L3无人车的摄像头、传感器等输入的信息转变为车速、路径、方向等最优的驾驶指令。
Road Hackers的推出表明,百度在L3和L4双路径并行突进。对百度来说,L3的数据也可以用到L4,当收集了足够多的公路数据、场景数据、用户数据、车的数据,并将这些数据和激光雷达的数据结合起来,可以让L4更快地实现。