06 冲入AI无人区:无人驾驶之路(第6/9页)
百度无人车的车顶装有一台64线激光雷达,通过持续地圆周旋转,对车身60米半径内的路况进行全景扫描。车辆两端和后方分别装有3个激光雷达,用于扫描邻近区域,弥补车顶雷达的视角盲区。这一连串的高分辨率激光雷达,构成无人车的“复眼”,对整体路况有了透彻的“俯瞰”,有助于实现在复杂交通环境下的自主驾驶。特别是针对交通拥堵、狭窄道路、小区和停车场等特殊场景,实现跟车、换道和交叉路口通行。
有了这些还不够,车顶前方还装有两个视觉识别摄像头,这样一双“眼睛”可以精准地识别交通信号灯、路面交通线和交通标志,弥补了激光雷达在雨、雪、雾等特殊天气条件下的“视力下降”,提高了对路标和信号牌的识别率。
从环境感知、行为预测,到规划控制、高精地图、高精定位,一辆无人车上集纳了当下多个领域最顶尖的技术。百度能在这么多的方向同时迸发,依靠的是在人工智能、深度学习领域的长期积累。当然,从无人驾驶技术的发展历程来看,今天百度无人车也可以说是立足在巨人之肩,每一台硬件设备都有过异想天开的“原型”。每一条技术路线都是全球无人车研究者在反复失败中提炼的“最优解”。
现在百度无人车还在中美两国进行着大量的路测。在百度的时间表里,2018年要实现百度无人驾驶公共汽车上路行驶载客。
一项技术从开始科研到落地使用,这不仅是百度的进步,也是中国制造的成就。从一开始,百度肩上扛的就不仅是“无人驾驶”的“小目标”。

图6-7 百度“云骁”无人车在乌镇亮相
注:用手机百度或智能革命App扫描图片可见AR效果。
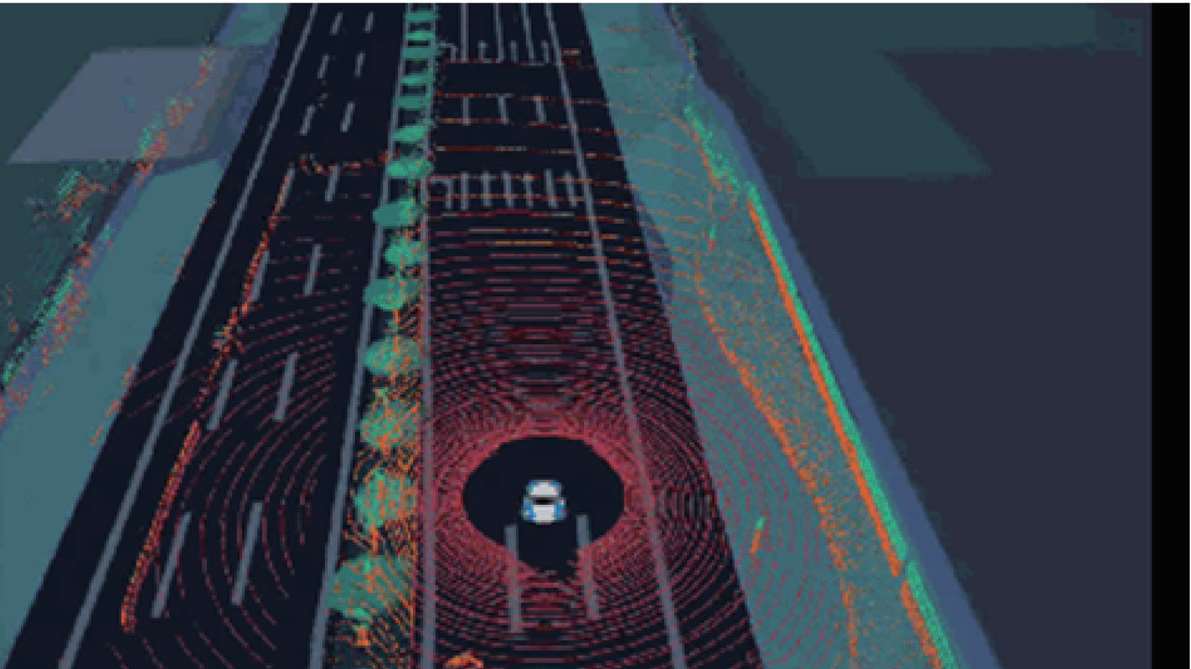
图6-8 百度无人车视角下的路面
在2015年的世界互联网大会上,百度展示的无人驾驶车就吸引了习近平主席的注意,习主席在百度公司展台的驻足时间超过10分钟,比原定时间长了3倍。中国工程院院士李德毅曾对无人车行业做出分析,他认为“以无人驾驶车为代表的轮式机器人将成为中国智能制造2025的首张名片”。无人车不仅是“车辆”,也因其自身装载的设备系统,在商业化过程中将直接带动雷达、传感器、导航系统等产业的快速发展,为建立车联网和物联网打下基础。无人车自身的战略价值,已经远远超过了一个交通工具。
中国的交通场景丰富、人口众多、市场庞大。无人车不但能为整个交通模式带来变化,还有可能给中国带来智能地铁、智能公共系统等新事物。智能交通是系统性、革命性、颠覆性的变化,随着技术的狂飙突进,需要改变的可能是人们的思维模式。
陆奇说起过自己的一桩逸事,他玩过一种特殊的自行车,是倒着骑的,方向盘往左拐轮子会倒过来,这其实和人工智能也有点关系。学习有几种方式,有一种是体验式学习,比如学骑自行车会摔跤,但学过就不会忘记,而学了这个特别的自行车就不会骑原来的自行车。在为无人车制定法律时,人类要避免刻舟求剑,继续用有人驾驶时代的思维束缚未来。
苦练无人车的内功与外功
在了解无人车技术的历史和现实背景后,让我们从技术层面深入无人车的“视和听”。
在“视距”上,无人车较之裸眼具有绝对优势,驾驶员的安全视距一般在50米左右,而无人车依靠多种中远距雷达、摄像头等传感器,能实现200米以上的超视距扫描观测。
另外,无人车的“视觉”方面还要克服许多对人类来说不是问题的问题。为了让它能够从不同角度对汽车和周围路况进行判断,我们要教会计算机在动态中识别哪些是车、哪些是天空、哪些是树。深度学习在这一过程中起到了巨大作用。
目前,在用摄像头来判断物体这项指标上,百度无人车准确率达到90.13%,2016年同期为89.6%。看似只有0.53%的提高,但对于无人车乘坐者的安危,每一点进步都值得坚持。在判断行人方面,百度无人车的准确率达到95%,判断红绿灯的准确率达到99.9%。而它的未来目标是,判断红绿灯的准确率必须达到100%。
当然,对无人车来说,光会“看”是不够的,要保证安全,还要有敏捷的反应,要能“刹得住”。人类驾驶员,从遇到紧急状况到踩下刹车需要0.6秒。而汽车的刹车要发生作用,其油压系统传导还需要0.6秒。也就是说,一般的人类驾驶员需要1.2秒的时间把车刹住。而百度无人车从“发现”紧急情况到做出刹车动作只需要0.2秒。未来,如果电动刹车取代液压刹车,百度无人车有能力做到在0.2秒内紧急制动,这将比人类平均的1.2秒快了整整1秒,高速驾驶中,1秒可能就是救命的时间。